By Jaap Bosch, head of business development, Ampyx Power
Over the past decade, airborne wind energy systems (AWES) have made significant research and development advancements. Using tethered flying devices, including kites and planes, AWES convert wind energy into electricity and will soon be part of wind energy’s promise to be a dominant energy source.
 While not yet mature, AWES technology is quickly advancing. Prototypes of sophisticated rigid-winged aircraft tethered to ground-based generators are now being deployed in Europe. These utility-scale AWES are designed with fully automatic and single-fault tolerant architectures that are scalable to the megawatt level.
While not yet mature, AWES technology is quickly advancing. Prototypes of sophisticated rigid-winged aircraft tethered to ground-based generators are now being deployed in Europe. These utility-scale AWES are designed with fully automatic and single-fault tolerant architectures that are scalable to the megawatt level.
When compared to traditional horizontal-axis wind turbines (HAWT), fixed-wing AWES present commercial benefits. The large swept wing area generates about four-times more power than a HAWT blade. An AWES can capture up to 20% higher wind speeds because it flies at higher altitudes. The mast of a HAWT is replaced by a tether and a compact launch/land platform for both land and offshore applications, reducing construction and decommissioning costs while decreasing the carbon footprint of HAWT by more than 50%.
At the same time, AWES startups are working to address developmental challenges. For example, before an AWES takes commercial flight, an aircraft must meet aviation safety certification requirements. It must also be financially viable to attract investors. To meet these requirements, AWES computer platform advancements are helping to bring the commercial promise of AWES to fruition.
Unmanned aerial vehicle advancements
Reliable AWES prototype technology starts by replacing steel and non-functioning materials with computers. For example, Ampyx Power’s AP-3 tethered unmanned aerial vehicle (UAV) demonstrator is equipped with a high-performance, scalable platform that enables fully automatic operation, safety and predictable performance.
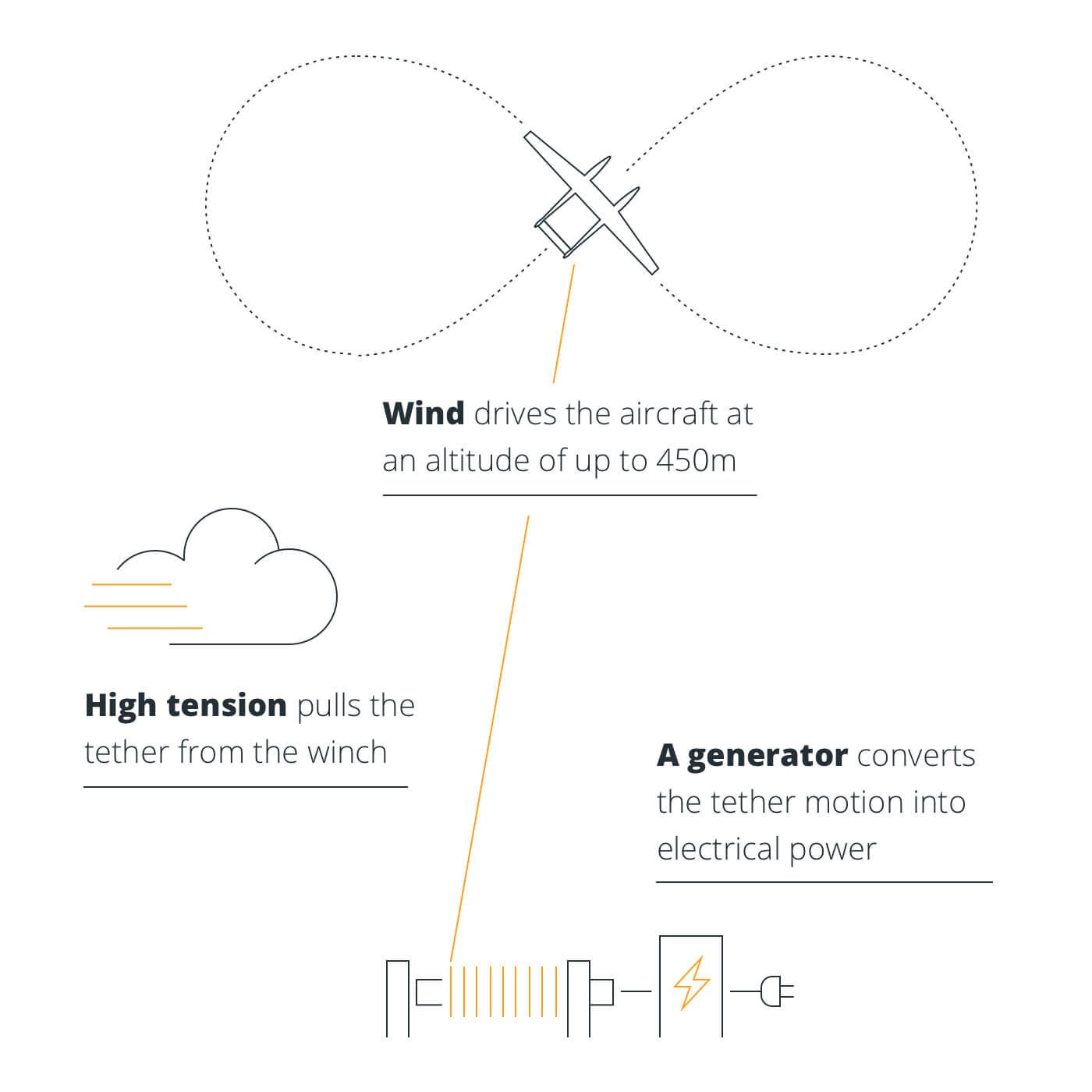 Under development since 2009, the AP-3 (based on predecessors AP-1 and AP-2) consists of an autonomous aircraft attached to a ground-based generator via the use of an ultra-strong and durable tether. The UAV then flies crosswind in repetitive patterns, pulling the tether that drives the generator. After this reel-out phase when electricity is generated, the wing glides back toward the generator and the process is repeated.
Under development since 2009, the AP-3 (based on predecessors AP-1 and AP-2) consists of an autonomous aircraft attached to a ground-based generator via the use of an ultra-strong and durable tether. The UAV then flies crosswind in repetitive patterns, pulling the tether that drives the generator. After this reel-out phase when electricity is generated, the wing glides back toward the generator and the process is repeated.
The double fuselage architecture provides the necessary clearance for the tether during maneuvers, including the climb and landing. Two propellers are needed for tethered climb, but a single propeller can return to base in any condition, even if the tether breaks or disconnects. The UAV runs on batteries that are sized for a single climb and to assist an emergency landing.
Optimized for power output, the wing generates lift more than eight-times the mass of the aircraft (4,200-kg force). During power generation, the UAV operates at an angle of attack (angle between wing chord and apparent wind) close to the maximum allowable (stall limit). The wing profile design provides smooth stall characteristics for aerodynamic safety. Most of the load is carried by a carbon spar. The wing skin is made of fiberglass, is not load-carrying and can withstand significant impact damage, such as hailstorms, without losing its overall integrity.
Safety is most important
An AWES can be operated in hard-to-access areas, making it a potential ground-breaking technology. Even though a tethered UAV will most likely fly in a low-density population area, it is an aircraft and must meet stringent aviation safety certifications before it is commercially viable.
 The brain of the AP-3 is the FORCE2C from Abaco Systems, a rugged sub-system that has been designed to be certified to DO-254 and DO-178C flight safety standards used on commercial aircraft electronics. The main control system can detect and recover from any single system failure. Also, an independently developed landing control system runs continuously in parallel and takes control should the main control system fail for any reason.
The brain of the AP-3 is the FORCE2C from Abaco Systems, a rugged sub-system that has been designed to be certified to DO-254 and DO-178C flight safety standards used on commercial aircraft electronics. The main control system can detect and recover from any single system failure. Also, an independently developed landing control system runs continuously in parallel and takes control should the main control system fail for any reason.
Three FORCE2C computers are used on the AP-3 in a triple redundant architecture, with redundancy achieved by a best-of-three voting algorithm. Each computer is connected to a separate sensor set, including a dual-band GNSS, air data probe (measuring airspeed and angle of attack), a three-axis accelerometer and a ring-laser gyro.
Six electronic boards have been integrated into an avionics enclosure. The enclosure provides system management for a failsafe and weather-proof connection among the three onboard computers, manual override (RF) systems, actuators, sensors and batteries. It also reads temperatures, position and load data in the landing gear, tether attachment system and power distribution system. The avionics also take the steering commands from the computer and distribute them to the servos that, in turn, convert electrical signals to manipulate the wings and other aircraft components.
Commercial systems will be used in a wind farm setting. The systems then will operate from a single SCADA. X-band radar integrated with satellite data will perform local threat prediction and detection that can trigger preventive landing or unmanned inspection or maintenance. Synchronized in groups, the UAVs can operate 400 to 500 m apart without interference.
Keeping cost and risk down
 Reducing costs during the proof-of-concept prototype stage, without compromising safety or reliability, is an important part of AWES development. The decision to design the computer system in-house or use a supplier can have make-or-break financial and time-to-market ramifications.
Reducing costs during the proof-of-concept prototype stage, without compromising safety or reliability, is an important part of AWES development. The decision to design the computer system in-house or use a supplier can have make-or-break financial and time-to-market ramifications.
In Ampyx’s case, significant cost savings are possible due to employing already-certified embedded electronics. Commercially available off the shelf, the investment in the computer technology has been amortized over other projects and customers. As a result, the cost to develop the AP-3 has been lower than if the computer platform was designed in-house.
 The AP-3’s FORCE2C sub-system has an open architecture computing and electronic system that allows Ampyx to generate all safety artifacts. The platform is delivered to Ampyx as a blank canvas with the processor, communications interfaces, I/O and avionics bus support. Ampyx creates its own fixed functionality on top of the platform. This also helps avoid schedule overruns and getting-to-market delays.
The AP-3’s FORCE2C sub-system has an open architecture computing and electronic system that allows Ampyx to generate all safety artifacts. The platform is delivered to Ampyx as a blank canvas with the processor, communications interfaces, I/O and avionics bus support. Ampyx creates its own fixed functionality on top of the platform. This also helps avoid schedule overruns and getting-to-market delays.
Ampyx Power has also reduced development costs because the platform builds on mature and reliable board-level products and has the artifacts required for design assurance level (DAL) D to DAL A. This gives Ampyx a confident path to certification while lowering the cost and reducing development time.
Reducing integration and testing has allowed Ampyx to focus on other features for the UAV, further lowering both risk and time to market. The FORCE2C platform is also designed to be suitable for a wide range of airborne applications, and compatible with off-the-shelf operating systems and APIs.
Additionally, the lighter the aircraft is, and the more compact the systems are, the easier it is to control and generate power. This is a major benefit of this flight computer compared to other options.
Looking ahead
 Now in the design phase, a commercial prototype UAV is planned. This AP-4 system will be a megawatt system with seven-times the wing surface area of AP-3 (80 m2). The avionics and most of the architecture of the UAV and launch/land system will be retained from the AP-3. The AP-4 will be certified for commercial operations with the European Aviation Safety Agency (EASA).
Now in the design phase, a commercial prototype UAV is planned. This AP-4 system will be a megawatt system with seven-times the wing surface area of AP-3 (80 m2). The avionics and most of the architecture of the UAV and launch/land system will be retained from the AP-3. The AP-4 will be certified for commercial operations with the European Aviation Safety Agency (EASA).
The AP-4 will be developed for the grid-connected power generation market. It will be deployable in onshore wind farms, especially in remote locations where infrastructure makes electricity an expensive commodity. The reduced weight and compact size in design will make the transportation and installation of AP-4 feasible in mountainous, remote areas and islands, where it is almost impossible for conventional HAWT to access and operate. Being capable of harvesting stronger winds at higher altitudes, AWES systems will be the cost-effective solution for wind power generation on sites further inland, with strong wind shear effects (the wind speed increases with altitude).
In the 2030s, Ampyx Power intends to make larger systems (AP-5, AP-6) for utility-scale energy production, both onshore and offshore. These systems will be designed to produce power at a lower cost than current conventional renewable energy sources.
 Jaap Bosch is head of business development for Ampyx Power. Ampyx Power develops Airborne Wind Energy (AWE), capturing the power of high altitude (500-m) wind with tethered aircraft, to reduce cost and open significant new markets for wind energy, accelerating the transition to a net-zero economy. Abaco Systems (a subsidiary of AMETEK) is a global leader in commercial open architecture computing and rugged embedded electronics. With more than 30 years of experience in aerospace and defense, industrial, energy, medical, communications and other critical sectors, Abaco’s innovative solutions align with open standards to accelerate customer success.
Jaap Bosch is head of business development for Ampyx Power. Ampyx Power develops Airborne Wind Energy (AWE), capturing the power of high altitude (500-m) wind with tethered aircraft, to reduce cost and open significant new markets for wind energy, accelerating the transition to a net-zero economy. Abaco Systems (a subsidiary of AMETEK) is a global leader in commercial open architecture computing and rugged embedded electronics. With more than 30 years of experience in aerospace and defense, industrial, energy, medical, communications and other critical sectors, Abaco’s innovative solutions align with open standards to accelerate customer success.
Filed Under: Featured



